Carl hat mir ein Radnabenmotor, 36V 250W, eingespeicht in eine 28 Zoll Alufelge, zur Verfügung gestellt.
Dafür zunächst mal vielen Dank an Carl, der diesen Motor erworben hat damit wir alle von den ermittelten
Meßwerten und gewonnenen Erkenntnissen profitieren können.
Es handelt sich dabei um einen Antriebsmotor für ein E-Bike, ausgestattet mit Neodym Magneten, hergestellt von
der Firma "Nine Continent". Dieser Motor arbeitet mit Drehstrom, der ihm aus einem 36V Akku über eine
Steuerelektronik und einen "Gasgriff" zugeführt wird. Ich untersuchte seine Eigenschaften als low rpm
Drehstromgenerator !
Die Anschlussdrähte ragen einseitig aus der (ebenfalls einseitig) durchbohrten Achse heraus. Im Foto gut
zu erkennen die drei dickeren Drähte für die Phasen sowie die dünnen Drähte für die Steuerelektronik.




Als ich die Achse des Motors das erste mal von Hand drehte, entfuhr mir ein " nääää, das darf ja wohl nicht wahr sein",
denn ich konnte die Achse nur unter grosser Kraftanwendung millimeterweise drehen. Der Grund war allerdings,
das sich zwei der drei Drähte für die Drehstromphasen dabei berührten und somit der Generator kurz geschlossen
war. Die Kraft die dann nötig ist um die Achse zu drehen ist subjektiv empfunden wirklich extrem hoch.
Mit offenen Anschlussdrähten empfindet man das Drehen an der Achse als "schwergängig". Sehr überraschend
war für mich dabei das nahezu vollständige Fehlen eines Rastmoments, das hatte ich ganz anders erwartet. Zu spüren ist
"lediglich" die besagte Schwergängigkeit, die man auch als Verlust- oder Leerlaufmoment bezeichnet, welches
sehr wahrscheinlich durch die Ummagnetisierungsverluste der Eisenanteile innerhalb des Generators entsteht.
Ich habe dieses Verlust- bzw. Anlaufmoment, das für das Andrehen überwunden werden muss, mit ca. 0,38 Nm
ermittelt. Wenn man unterstellt das dieses Verlustmoment auch bei höheren Drehzahlen in etwa gleich bleibt, dann
entstehen dadurch folgende (Leerlauf)Verlustleistungen im Generator, die zunächst überwunden werden müsssen,
bevor eine Leistungsabgabe erfolgen kann.
bei 30 U/min = 1,2 Watt Verlustleistung
bei 60 U/min = 2,4 Watt Verlustleistung
bei 100 U/min = 3,4 Watt Verlustleistung
bei 150 U/min = 6,0 Watt Verlustleistung
bei 200 U/min = 8,0 Watt Verlustleistung
bei 300 U/min = 12 Watt Verlustleistung
bei 500 U/min = 20 Watt Verlustleistung
Jetzt folgen die elektrischen Messungen am Generator. Als erstes ermittelte ich den ohmschen
Widerstand zwischen jeweils zwei der drei Phasenanschlüsse mit erstaunlich niedrigen ca. 0,5 Ohm.
Setzt man vorraus das der Motor im Stern verschaltet ist, dann bedetuet das lediglich ca. 0,25 Ohm pro Phase.
Da hätte ich einen deutlich höheren Widerstand erwartet, vielleicht 1 oder 2 Ohm, aber um so besser.
( Weniger = besser )
Ich habe dann die Achse des Motors im Schraubstock fixiert und die drei Phasen an einen, aus 6 Schottky
Dioden bestehenden, Drehstrom Brückengleichrichter angeschlossen. Es folgte dann zunächst die Messung
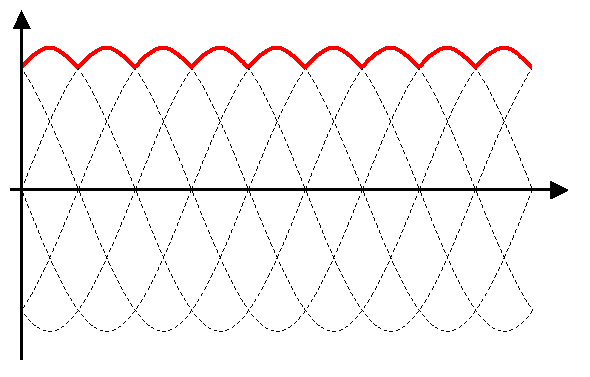
der Leerlaufspannung bei verschiedenen Drehzahlen ohne Belastung.


Ich habe das eingespeichte Rad von Hand gedreht und gleichzeitig über einen Fahrradtacho die Drehzahl
ermittelt sowie über ein Multimeter die erzeugte Spannung hinter dem Brückengleichrichter gemessen.
Folgende Leerlaufspannungen konnte ich messen:
60 U/min = ca. 8,5 V
100 U/min = ca. 14 V
Die Leerlaufspannung blieb auch bei anderen Drehzahlen recht konstant proportional zur Drehzahl, nämlich etwa
U/min mal 0,14 = Leerlaufspannung. Aus dieser Erkenntnis kann man dann folgende Leerlaufspannungen
rechnerisch ermitteln:
30 U/min = 4,2 V
150 U/min = 21 V
200 U/min = 28 V
300 U/min = 42 V
500 U/min = 70V
Dann habe ich Leistungswerte unter Belastung mit zwei unterschiedlichen 12V Halogenlampen gemessen,
während der Generator mit 60 U/min rotierte:
12V Halogen 20 W, 60 U/min = 7V und 1,3A = 9,1 Watt
12V Halogen 35 W, 60 U/min = 6,2V und 2,2A = 13,6 Watt
Resumee:
Mir persönlich erscheint dieser Radnabenmotor, eingesetzt als Drehstromgenerator, besser geeignet zu sein
als ich das vor meinen Tests vermutete. Negativ gegenüber einem eisenlosen Generator sind ganz klar die
Leerlaufverluste zu nennen, welche nach meiner Einschätzung aber in ihrer Höhe gerade noch akzeptabel sind,
insbesondere wenn man den vergleichsweise günstigen Preis des Generators und dessen Fähigkeit bedenkt,
ohne ein Getriebe aus relativ geringen Drehzahlen Leistung erzeugen zu können.
Um eine Ladespannung für einen 12V Akku zu erreichen sind nur knapp 100 U/min nötig. Damit kann man diesen
Generator durchaus als ausgeprägten "Low Speed" Generator bezeichnen, wie man ihn bei Vertikalrotoren,
wegen der dort meist vorherrschenden geringen Drehzahlen bei hohem Drehmoment, gut einsetzen kann.
Sein Anlaufmoment beträgt knapp 0,4 Nm. Als Beispiel: unser 50 x 50cm C- Testrotor 3 Flügler erzeugt bei
ca. 4m/s ein Drehmoment von 0,2 bis 0,25 Nm) Daraus resultiert das ein C-rotor in der Grössenordnung von
ca. 1m x 1m (4 faches Drehmoment) gut zu diesem Generator passen müsste. Gleiches gilt vermutlich für einen
Savoniusrotor. Evtl. wäre aber ein Rotordurchmesser von 1m bei ca. 1,5m Flügelhöhe noch besser geeignet, weil
dadurch mehr Drehmoment bei gleich (hoher) Drehzahl entstehen würde = früherer Ladebeginn und mehr Leistung.
Mit einem Gleichrichter, der wie bei unserem "Miniwindradprojekt" als Spannungsverdoppler arbeitet,
würde man nicht erst bei 100 U/min, sondern weitaus früher in den 12V Ladebeginn kommen. Nach meiner
Einschätzung ist das auch ratsam, da sonst der Ladebeginn erst bei vergleichsweise hohen Windstärken erfolgen
würde. Auch wäre ein Step up Wandler, wie in Jürgen vorschlug, sicher interessant.
Grüsse
Bernd